
Mechatronik
Welche Aufgabe hat das Labor für Mechatronik?
Im Labor für Mechatronik lernen Sie die grundlegenden Technologien im Bereich der Automatisierungstechnik, Robotik, SPS-Programmierung und Mechatronik kennen. In zahlreichen praxisnahen Praktikumsversuchen erlangen die Studierenden die Fähigkeit Aufgabenstellungen aus dem Bereich der Automatisierungstechnik, Robotik und Mechatronikzu lösen. Außerdem bietet das Labor für Mechatronik eine hervorragende Ausstattung zur Durchführung von Projekten, Abschlussarbeiten oder Workshops.
Ausstattung des Labors?
- 4 Universal Robots des Typs URe3 mit verschiedenen Endeffektoren
- Speicherprogrammierbare Steuerungen, u. a. von Beckhoff und Siemens mitdiversen Erweiterungskarten
- Prozessleitsystem APROL von BuR
- Diverse Sensorik und automatisierungstechnische Beispielaufbauten
CNC-Fräse, Lasercutter, 3D-Drucker
- Codesys
- TwinCAT
- Siemens TIA Portal
- Siemens Simit
- Autodesk Inventor
- Eagle
- APROL
- UR Sim
Projekte und Praktika im Labor?
In dem Laborpraktikum zu der Vorlesung „Industrielle Steuerungen“ wird von den Studierenden in Teamarbeit eine einfache Robotersteuerung sowie ein automatischerFertigungsablauf realisiert. Dieses Praktikum dient dem Erlernen der SPS-Programmierungund somit der praktischen Anwendung des Vorlesungsstoffes. Als Software wird hierfür TwinCAT3 und CODESYS verwendet.
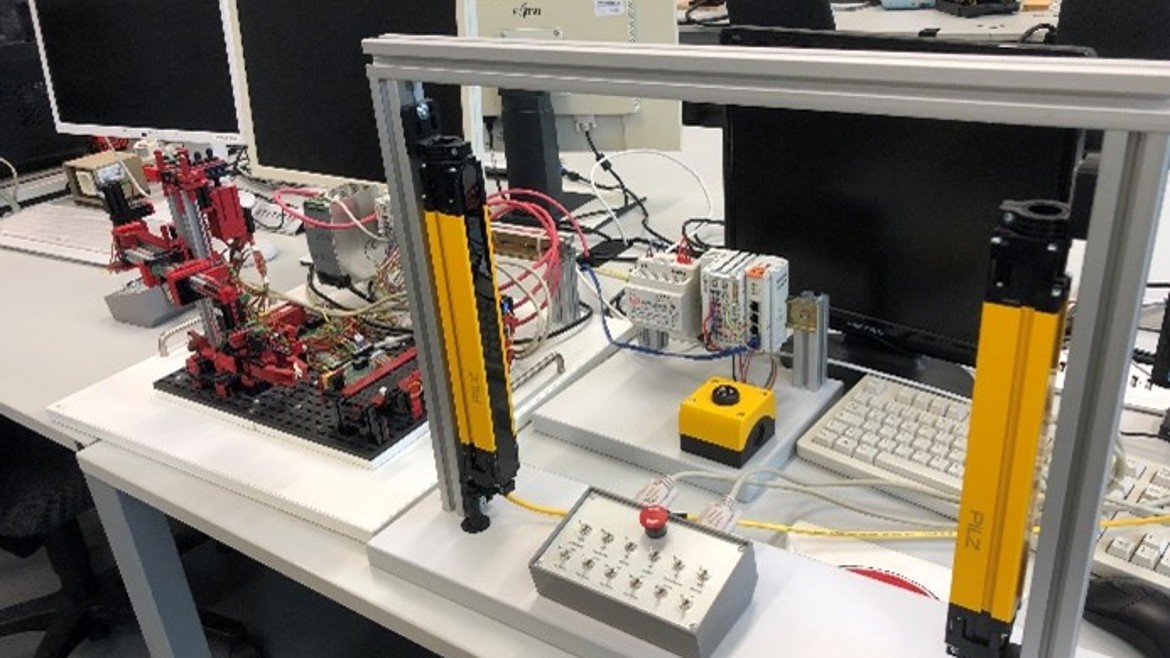
Erweitert wird das Praktikum zudem um die Sicherheitskomponenten eines Sick-Laserscanners sowie einem Not-Aus. Hier lernen die Studierenden diese gängigenSicherheitskomponenten und die dafür nötige Programmierung von sicherheitsrelevanten Applikationen kennen.
Während des Sensorversuch lernen die Studierenden das Verhaltens und die Besonderheiten von verschiedenen Sensoren (z. B. Näherungsschalter, Ultraschallsensoren, optische Sensoren) kennen und können diese erproben.
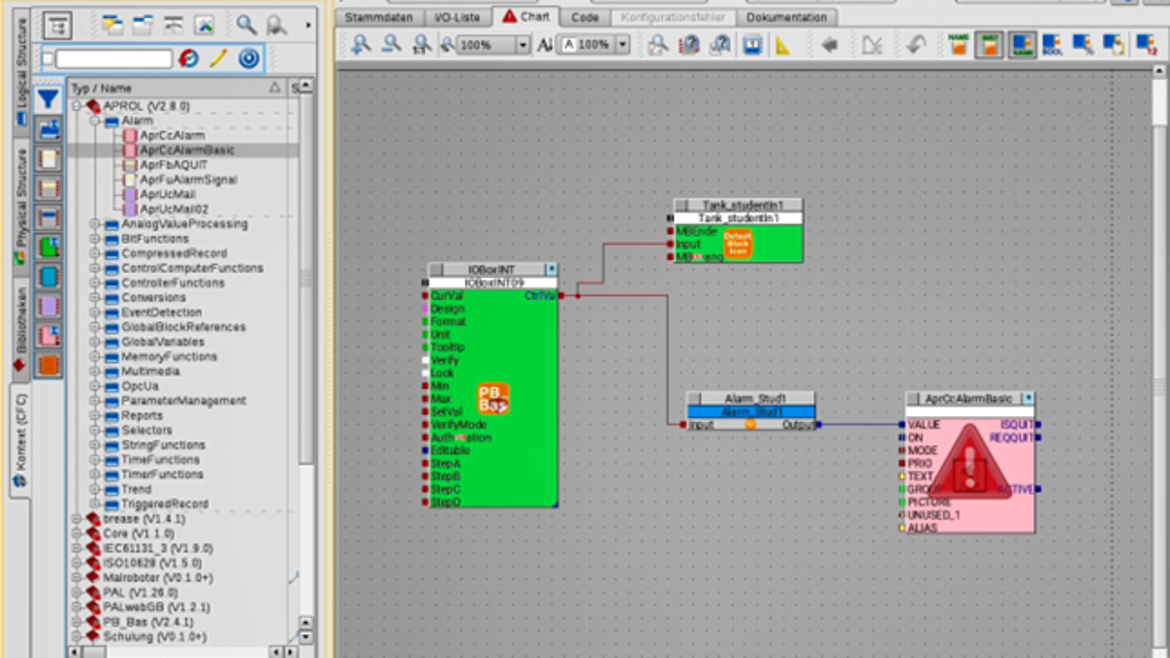
Die Studierenden arbeiten mit dem Prozessleitsystem APROL von BuR und programmierenverschiedene Überwachungsfunktionen. Zusätzlich ist es möglich, verschiedeneKomponenten des Labors wie die UR-Roboter oder speicherprogrammierbare Steuerungenan das Prozessleitsystem anzubinden.
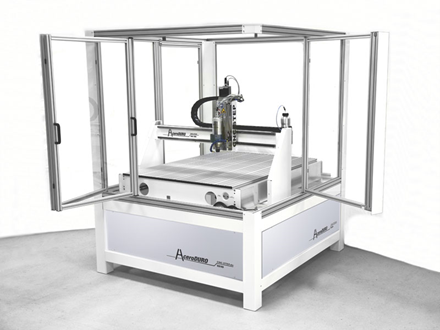
Mit der Software Autodesk Inventor können Studierende Demobauteile konstruieren,Simulationen und Parametervariationen durchführen, Fertigungsprogramme ableiten undanschließend mit verschiedensten Fertigungstechnologien, wie 3D-Druck, CNC-Fräse oder Lasercutter die konstruierten Bauteile fertigen. Den Studierenden stehen hierfür eine 3-Achs-CNC-Fräse, ein High-Speed-Lasercutter sowie verschiedene 3D-Druck-Technologien zurVerfügung.
Im Labor stehen vier Universal Robot des Typs UR3e bereit. Dies ist ein ultraleichter, kompakter, kollaborierender Tischroboter. Alle seine Gelenke sind um 360 Grad rotierbar und sein Handgelenk kann begrenzungsfrei gedreht werden. Dadurch ist es möglich hochpräzise Montage- und Schraubarbeiten zu bewältigen. Anwendung finden die UR-Robots zum Beispiel in einem Praktikum zum Erlernen vonRobotik-Grundwissen und zur Gewinnung von Kenntnissen über verschiedenste Verfahren zur Roboterprogrammierung. Ebenfalls werden damit verschiedene Beispielanwendungen wie etwa das Palettieren, der Aufbau einer Demo-Fertigungsanlage mit SPS-Kommunikation und Anbindung an einProzessleitsystem oder kamerageführte Roboterbewegungen umgesetzt. Auch kann hier der Einsatz von Sicherheitstechnik mit einem Sick Laserscanner erlernt werden.
In dem Projekt Automatisierungstechnik setzen die Studierenden ein reales Projekt in kleinen Gruppen um. Die dabei erlernten und vertieften Kompetenzen reichen von der Elektronik und Steuerungstechnik, wie beispielsweise der Verwendung von speicherprogrammierbaren Steuerungen und Arduinos, bis hin zur Mechanik, wobei die CAD-Konstruktion, Montage und Fertigung von Bestandteilen erfordert werden. Viele Projekte geben auch Einblicke in die Robotik sowie die Integration der erforderlichen Aktorik und Sensorik. Zusätzlich zu der technischen Umsetzung des jeweiligen Projekts werden von den Studierenden für einen erfolgreichen Abschlusses des Projekts zusätzlich soziale Kompetenzen im Team sowie Fähigkeiten im Projektmanagement gefordert.

Beispiele für studentische Projekte:

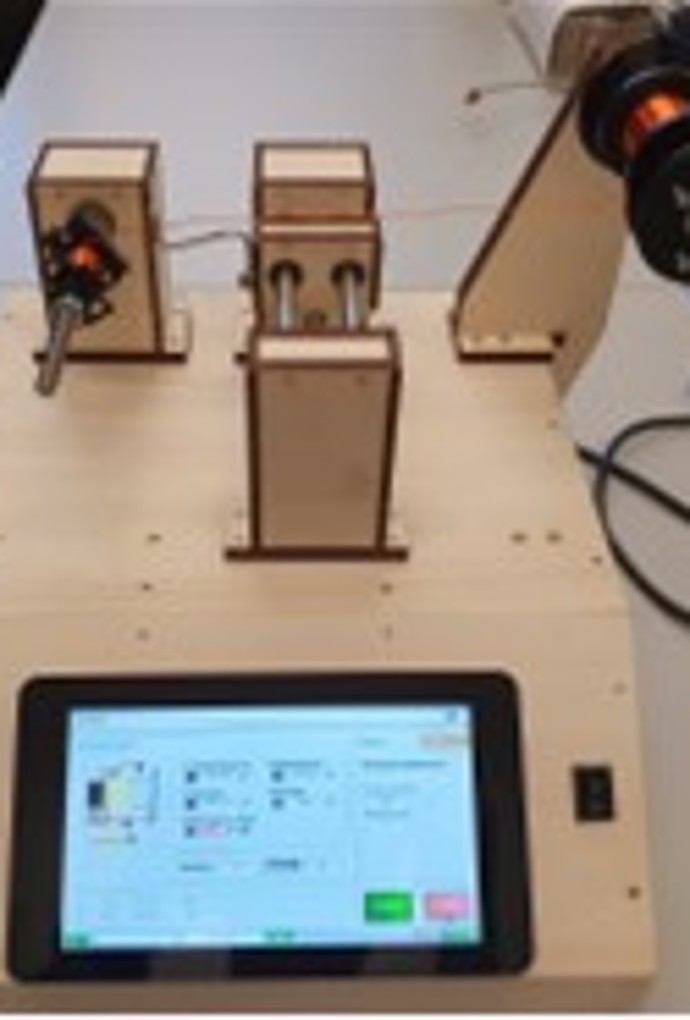
Umsetzungsbeispiele für einen automatischen Spulenwickler:


Automatische Pflanzenbewässerung:

Solartracker:
Der in einem Projekt entstandene Solartracker ist ein Solarmodul, das nach dem Sonnenstand ausgerichtet werden kann, um die optimale Leistung zu erbringen. Gesteuert wird das Modul über eine speicherprogrammierbare Steuerung.

EcoRob:
Ein umgesetztes Projekt im Labor war der Entwurf und die Umsetzung eines mobilen Roboters. Zur Realisierung wurde die elektronische Umsetzung, Ansteuerung, sowie die Integration und Auswertung von Sensorik von den Studierenden realisiert.
CNC-Fräse und Lasercutter

Auswahl zur Verfügung stehender 3D-Drucker


UR-Robots




Veranstaltungen

Girlsday und Veranstaltungen für Schüler:innen
Regelmäßig finden Veranstaltungen für Schüler und Schülerinnen im Labor statt, bei dendiese in Themen der Automatisierung und Robotik eingeführt werden. Am Beispiel einesselbst hergestellten Holzroboters bekommen die Schüler:innen Einblicke in dieProgrammierung, Sensorik, Aktorik und Steuerungstechnik.


Exkursionen
Die Studierenden unternehmen regelmäßig Exkursionen zu Messen wie der SPS in Nürnberg oder der Automatica in München. Zudem finden auch Exkursionen und aktuelle Fachvorträge von Firmen statt.
Wo ist das Labor zu finden?
Sie finden das Labor im RGB 0.009 und können nach entsprechender Terminvereinbarung gerne vorbeikommen.
Noch Fragen?
Bei Fragen oder Anfragen zu offenen Themen für Abschlussarbeiten oder Tätigkeiten als studentische Hilfskraft wenden Sie sich gerne an
Prof. Dr.-Ing. Claudia Ehinger
Offene Themen für Abschlussarbeiten:
- Optimierung des Solartrackings zur Leistungsteigerung bei Solarzellen
- Aufbau einer Ablaufsimulation für einen Fertigungsablauf
- Einsatz von ChatGPT bei der Programmierung von SPSen
- Ansteuerung einer Linearachse zum Abfahren von Bewegungsprofilen
- Weitere Themen nach Anfrage